Image

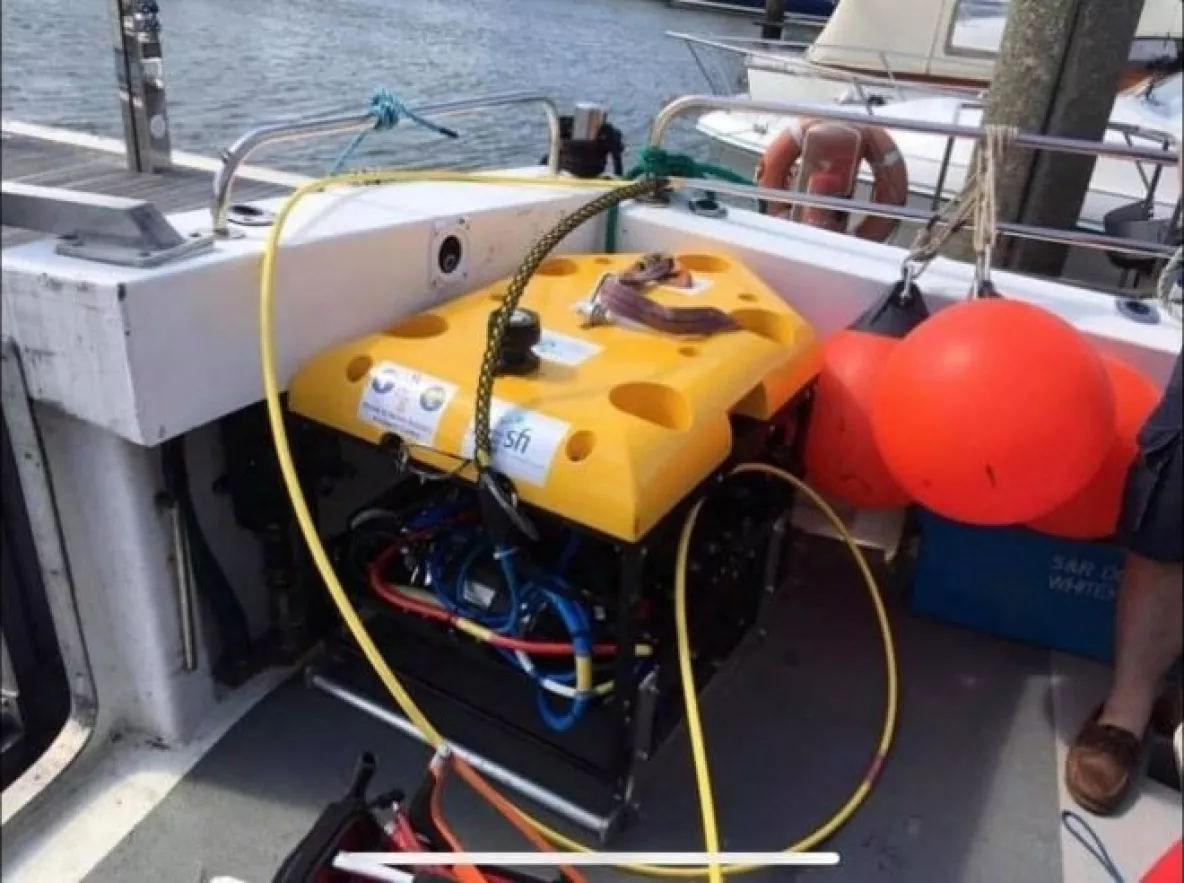
At the end of August 2019, the Centre for Robotics and Intelligent Systems (CRIS) carried out a survey of the RMS Lusitania shipwreck site. The aim was to achieve survey operations from a small vessel in ‘Live ROV (remotely operated vehicles) mode’ whereby the ship is in motion under the main propeller while under ROV survey. The results would allow low-cost ROV operations and survey in relatively deep-water (50m+). The survey plan was to complete an MBES survey at the height of 10m above the wreck site. Following this, to complete a photogrammetry survey at 5m above the wreck site. However, due to some technical issues with unreliable thrusters, the team only managed to record a small section of MBES data. Unfortunately, the quality of data was compromised by different technical faults during the mission, so the team planned to repeat the trials soon, hoping to achieve good quality input data, which then could be used for a highly accurate 3D site reconstruction.